


“Top-of-Motor振动”刊登在2012年9月刊上BETVICTOR体育官网泵和系统提供了一个用于估算垂直、湿坑、柱式泵上电机顶部轴承振动的数学模型(见图1),这是垂直泵用户、规范者和制造商一直感兴趣的话题。简化的悬臂梁模型有助于理解垂直泵的振动,并允许与经验数据进行比较,以制定顶部电机轴承的标准振动验收标准,目前尚无指导意见。BETVICTOR体育官网本系列的第一部分讨论了通过分析数学模型可能获得的见解。
该结构包括安装在泵排泄头上的电机,位于底板之上。作为背景资料,下面列出了数学模型的简化假设:
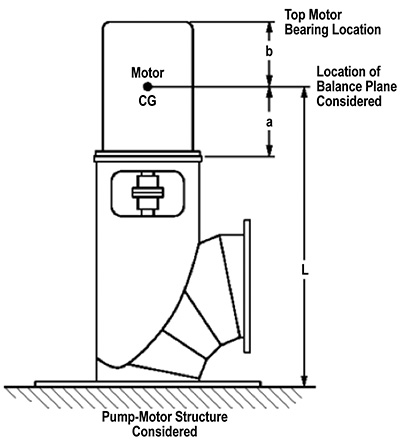 图1。立式泵及电机
图1。立式泵及电机- 感兴趣的结构是在一个垂直,湿坑,柱式泵的底板之上。
- 重点是振动在顶部电机轴承,因为电机不平衡。
- 不平衡作用于电机转子重心位置的单个水平面上。
- 电机的CG与电机转子CG在同一水平面上。
- 只考虑在运行速度下的滤波振动。
- 只考虑电机质量。
- 由于模型中没有考虑基础效应,因此隐含了无限刚性基础。
- 所考虑的固有频率为底板以上结构的簧片频率。如前所述,这与电机簧片频率不同,电机簧片频率总是高于结构簧片频率。
- 可能体验到的其他相应固有频率和激励源的相关振动模式不包括在本系列的范围内。只考虑旋转不平衡。
在这些限制范围内,在2012年9月的文章中,使用与某个安装对应的特性的示例提供了该特定安装的计算振动响应。该模型可以提供一般适用于这种类型安装的见解。
有关电机顶部振动的一些问题包括:
- 顶部电机轴承距离基础的高度是否应该是该轴承振动接受准则的考虑因素?
- 结构的刚性是如何起作用的?
- 电机平衡等级的作用是什么?
- 基础刚度如何影响振动?
由数学模型可知,电机CG处的振幅(X)振动如式1所示。
方程1: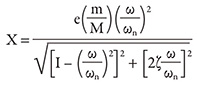
地点:
X =结构在电机处的位移幅值CG(英寸);这是峰值位移,并将其加倍以获得峰值到峰值的值。
e =与剩余不平衡(英寸)和操作速度有关的旋转质量的偏心量。这是由电机的平衡等级决定的。参考ANSI S2.19或ISO 1940/1。
m/ m =旋转电机转子重量(m)与电机重量(m)的无因次比值。
ω/ωn =工作速度(ω, rpm)与结构簧片频率(ωn,每分钟周期- cpm)的无因次之比,无论是通过计算(如2012年9月的文章所述)还是通过测试确定。
ζ =阻尼因子(无量纲);在泵装置中,这些类型结构的阻尼因子被观察到在0到0.03之间(0到3%)。
无量纲振动响应可以在图2中图形化地描述。
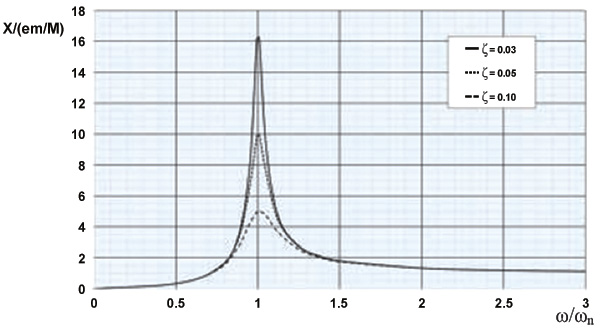 图2。旋转不平衡的振动响应
图2。旋转不平衡的振动响应电机CG的峰峰位移为2X(英寸)。在2012年9月文章的例子中,顶部电机轴承的振动响应是电机CG振动的两倍。这对于此类安装是相当典型的。电机轴承顶部的峰值振动为4倍(英寸)。用mils表示,电机轴承顶部的振动为(4X/ 1000)。
由于激励是由在运行速度时发生的电机不平衡引起的,这是可以直接转换为其他振动单位的过滤振动。例如,将mils峰间位移转换为速度可以用公式2计算。
公式2:V = (Mils) (CPM) / 19,099
地点:
V =速度,英寸/秒(峰值)
均方根(RMS)速度单位通常用于振动。均方根速度单位可以用公式3计算。
式3:Vrms = (0.707) (V)
平衡等级解码
为了本文的目的,有必要解释一下美国国家标准协会(ANSI)和国际标准化组织(ISO)的标准平衡等级。电机制造商的标准平衡等级对应于ANSI S2.19或ISO 1940/1的平衡等级,如G2.5, G6.3或一些临时等级(G,毫米/秒)。根据ANSI S2.19或ISO 1940/1,等级编号G是指以毫米/秒为单位的恒定速度值。例如,G6.3指的是6.3毫米/秒剩余不平衡。
ANSI S2.19和ISO 1940/1中的图表还提供了基于所选平衡等级和适用操作速度的偏心距(e,毫米)。这些图提供了与公式4中的关系相对应的偏心值。
平衡等级“G”数= (e)
公式4:[(2Π) (rpm) / (60)]
将e的单位重新排列并转换为英语习惯单位,得到式5,其中G的单位为毫米/秒,e的单位为英寸。
e =[(60)(平衡级“G”号)]/[(2Π)(rpm) (25.4)]
或
公式5:e =[(0.376)(平衡等级“G”数)]/ (rpm)
样本的研究
产生电机顶部振动的结果值所需的输入参数为:
- (m/ m)质量比
- 平衡等级“G”
- rpm
- 阻尼因子ζ
- (ω/ωn),频率比
在平衡等级的讨论中可以看到,平衡等级“G”和rpm会产生所需的参数“e”。从公式1到5,如果可以确定质量比(m/ m)、平衡等级“G”、rpm、阻尼因子和频率比的通用值,则可以确定在较宽的设计运行速度范围内(以及相应的泵尺寸)可以合理预期的计算振动结果。
2012年9月的文章提供了在实际结构簧片频率特性通过测试已知之前计算结构簧片频率的推导。这对于在工作速度和结构簧片频率之间获得令人满意的分离以及频率比的可接受的限制是有用的。没有对频率比提供具体的指导。在图2中,当ω/ωn的值偏离1.0时,越大的偏离所带来的收益就越小。当ω/ωn的某些值从1.0移除时,实现成本和实用性因素可能会变得令人望而却步。反之,如果频率比ω/ωn不够,振动响应就会被放大而不可接受。
相对于可接受的频率比限制,液压研究所将很快有一个新的出版物,ANSI/HI 9.6.8泵机械动力学导则,为本主题和其他主题提供指导,以避免共振,并对不同类型的旋转动力泵设备和结构进行动态分析。该指南指出,在安装的设备上通过现场测试获得的频率分离裕度为10%,对于避免不可接受的振动通常是令人满意的。认识到频率比传达的信息与频率分离裕度相同,只是以不同的方式表达。
在分析研究中,考虑现场安装情况,假设频率分离裕度由测试确定为10%。其他需要的输入值是:
(m/ m)质量比= 0.25 ~ 0.375;使用0.33作为示例研究
平衡等级“G”= 2.5至6.3;由电机供应商的标准或买方的规格决定;使用这些值进行比较
转数= 3,600转至600转;为了简单起见,使用同步速度
阻尼因子(ζ) = 0 ~ 0.03;在示例研究中使用0.02或2%
频率比(ω/ωn) = 0.9或1.0;以0.9为例研究,或ωn比泵速高10% ω
请注意,一些使用保守或激进假设的研究提供了一个振动水平的包线,可以用所提出的数学模型合理地预期。表1和表2描述了使用上述输入信息的两个示例研究的结果。表1描述了G6.3剩余不平衡的结果。表2描述了在所有其他输入相同的情况下,G2.5剩余不平衡的结果。
结果
- 由方程1和图2可知,振动响应受频率比(分频裕度)的影响。
- 振动响应随电机平衡等级线性变化。这是公式1的预期结果,表1和表2的结果证实了这一点。请注意,电机平衡等级G2.5的产量值为平衡等级G6.3的40%。
- 从表1和表2可以看出,当使用速度单位时,在不同的泵设计运行速度下,得到的振动响应是恒定的。这是预期的,因为激励是基于恒速度的电机不平衡值(平衡等级)。通常,转速高的泵需要较小的泵,转速慢的泵需要较大的泵。BETVICTOR体育官网结果包括一系列泵的尺寸。本系列的第二部分将讨论用于标准验收准则的振动单位的主题。
- 从表1和表2可以看出,以mils为单位得到的振动响应峰到峰不是常数,而是随设计运行速度而变化。同样,结果包含了泵的尺寸范围。本系列的第二部分将讨论用于标准验收准则的振动单位的主题。
- 10%的频率分离裕度(在现场测试中获得)在顶部电机轴承处产生一系列合理的振动响应。
 表1。例一的结果
表1。例一的结果 表2。例2的结果
表2。例2的结果研究结果的意义
- 如式1和表1、表2所示,在固定结构簧片频场特性的情况下,根据试验假设,不考虑电机顶部轴承高度、结构刚度和基础刚度等因素,计算振动响应。分析经验现场数据以确定电机顶部轴承振动验收准则不应考虑这些参数,验收准则也不应基于这些参数。
- 当现场结构簧片频率特性(基于测试)未知并通过计算确定时(例如在项目的前期施工阶段),高度和刚度特性会影响计算结构簧片频率的值,这在2012年9月的文章中讨论过。计算的簧片频率纳入公式1,不考虑结构高度和结构刚度。
- 在施工前阶段准确预测结构簧片频率对于获得可接受的频率比非常重要。
- 由于现有结构簧片频率计算方法的不准确性,在计算结构簧片频率时,应使用高于±10%的分频比值来获得±10%范围内的实际分频比值。
- 在施工前阶段确定结构簧片频率,由于电机簧片频率主导结构簧片频率结果,电机供应商提供的电机簧片频率必须准确。
- 通常情况下,不同的现场振动水平测量与管道的轴线和垂直于管道的轴线。这是由于不同方向所对应的场结构簧片频率特性不同,对应的频比值(或频距)也不同,从而导致不同的响应。
的本系列的第二部分(2014年4月)包括减少电机顶部振动的指导方针,泵的基础对振动的影响和运行速度的考虑。
参考文献
- 克莱斯顿,J.《电机顶部振动》BETVICTOR体育官网泵和系统2012年9月。
- ANSI /嗨9.6.8,泵机械动力学,新泽西州帕西帕尼液压研究所,www.BETVICTOR体育官网pumps.org.